Aviation Accident Investigation based on Model-In-the-Loop simulation (MIL)

April 2013 (In class project)
In this project, a new approach is presented to assist Aviation accident investigation. The new approach uses Model-In-the-Loop (MIL) technology to simulate flight accident using data from airport radar or voice cockpit recorder and flight data recorder, i.e. black box. I implemented the simulation model including Aircraft Movement Control system, Flight Angle Control system and Landing Gear Control. Comparing to traditional approach, MIL simulation is easier to implement, faster to simulate and costs less on each investigation.
A presentation was given in class “COM S 515 software system safety”.
Paper: Click here to download
Slides: Click here to download
Development of TCU software test system based on Hardware In the Loop (HIL)

Jan. 2011 – Dec. 2012
I developed a real time HIL system to simulate and test different driving scenarios including failure unit injection. The system can also run automatic test routines in two different ways:
- Manually write python script and execute the testing scenario on HIL.
- Connect HIL to TestWeaver. Then the system will automatically generate test cases, execute the driving scenario, record and report failed tests.
A paper and a presentation about this system was given on The 11th International CTI Symposium at Berlin (Click the text to download):
Intelligent Test‐Case Generation for automated Validation of TCUs
Car display design and application (May. 2012)
![Decoding signals on the CAN BUS[11-34-34]](https://www.samsonlab.com/wp-content/uploads/2013/07/Decoding-signals-on-the-CAN-BUS11-34-34.jpg)
The car display can show selected CAN signals on the screen and update them in real time bases. My contribution is:
- Designed software requirements and architecture.
- Developed display and decode algorithm.
Video: http://youtu.be/v4AUkRnFXgw
CAN Decoder: software that decodes signals on CAN Bus (July 2011)
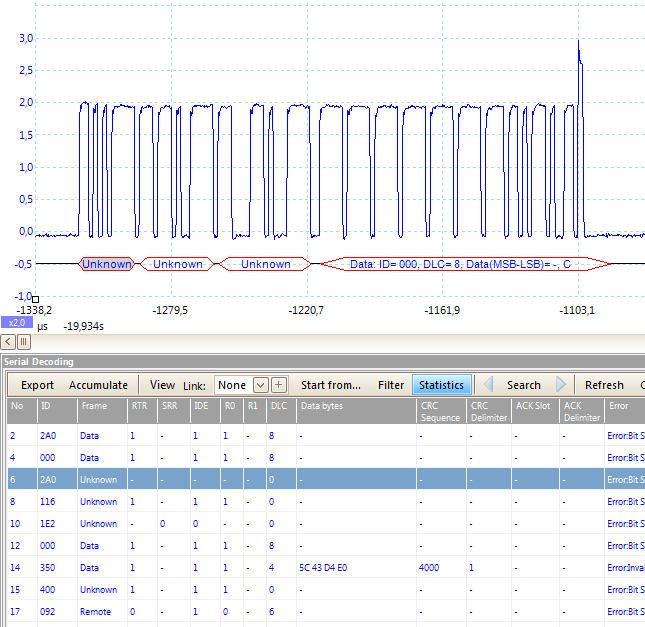
The software records raw signals and decode them into meaningful CAN signals.
My contributions are:
- Developed software interfaces to communicate with CANape and PCAN devices to record CAN signals.
- Designed algorithm to decode raw signals into meaningful CAN signals and calculate the offset and scale.
- Export decoded CAN signals into Vector DBC file.
Cruise Control System (Jan 2011)

In order to measure the gas consumption, we developed a cruise control system. The system was verified and validated both on HIL and drum.
Massive video retrieval system (Jan 2010 – May 2012)
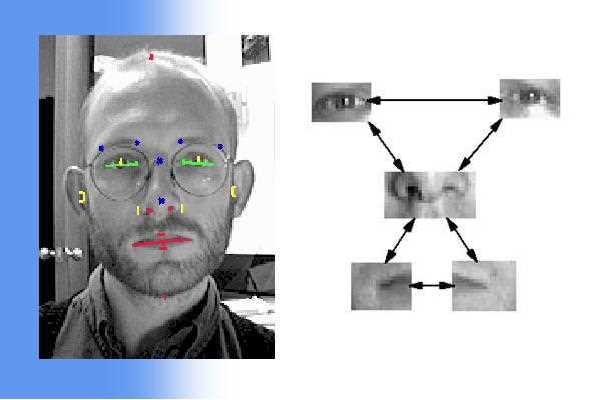
The system can retrieve massive surveillance footage from different servers and run multiple face recognition tasks simultaneously. The found face will be reported to the control panel.
The face recognition rate is over 90% regardless of illumination, scale and rotation.
My contributions are:
- Developed core face recognition algorithm using C++.
- Designed software structure and network layers to connect with different components
- Optimized paralleled algorithm both on GPU and CPU.
The software is certified by Wuxi SensingNet Industrialization Research Institute
Photo of the certification: Page 1, Page 2
“Freescale” smart car design
![road detection[11-18-56]](https://www.samsonlab.com/wp-content/uploads/2013/07/road-detection11-18-56.jpg)
Apr 2009
We designed a car that recognize the road and drive along the black line.
The smart car won the third prize in “Freescale” Smart Car Design Contest
Video: http://youtu.be/cO6eP8w5wrg
